Trong thập kỷ qua, các hệ thống robot đã cách mạng hóa nhiều lĩnh vực, trong đó có nông nghiệp và trồng trọt. Nhiều công việc trước đây thực hiện thủ công hiện nay đã được tự động hóa, nâng cao hiệu quả, giảm khối lượng công việc mà người nông dân và những người lao động nông nghiệp khác phải làm.
Hai nhóm công việc trong canh tác có thể được tự động hóa, mang lại hiệu quả cao là kiểm soát cỏ dại và giám sát sức khỏe cây trồng. Do nhu cầu về thực phẩm hữu cơ sạch hơn, được nuôi trồng với lượng hóa chất và thuốc trừ sâu tối thiểu liên tục tăng lên trong những năm qua, nhiều trang trại và nhà nông tìm kiếm những phương án khả thi và sạch hơn để kiểm soát cỏ dại, loại bỏ sâu bệnh và theo dõi tình trạng cây trồng.
Trang Tech Xplorer, dẫn thông tin đại chúng của Đức cho biết, nhóm nhà nghiên cứu thuộc Đại học Bonn, Đức đã phát triển một hệ thống robot mới, có thể giúp nhà nông kiểm soát, tiêu diệt cỏ dại và giám sát cây trồng hiệu quả hơn. Hệ thống robot nông nghiệp có tên gọi là BonnBot-I, được giới thiệu trong một bản báo cáo khoa học, xuất bản trên nền tảng trực tuyến arXiv.
Trong báo cáo khoa học, các nhà nghiên cứu TS Alireza Ahmadi, PGS.TS Michael Halstead và GS Chris McCool tham gia phát triển robot viết: “Trồng trọt và làm cỏ là 2 trong số những công việc chính mà người nông dân phải thực hiện thường xuyên hiện nay. Một thách thức gần đây đối với việc làm cỏ là mong muốn giảm sử dụng thuốc diệt cỏ và thuốc trừ sâu nhưng vẫn duy trì chất lượng và số lượng cây trồng. Chúng tôi giới thiệu BonnBot-I, một nền tảng kiểm soát cỏ dại chính xác đồng thời thực hiện nhiệm vụ giám sát tình trạng cây trồng thời gian thực".
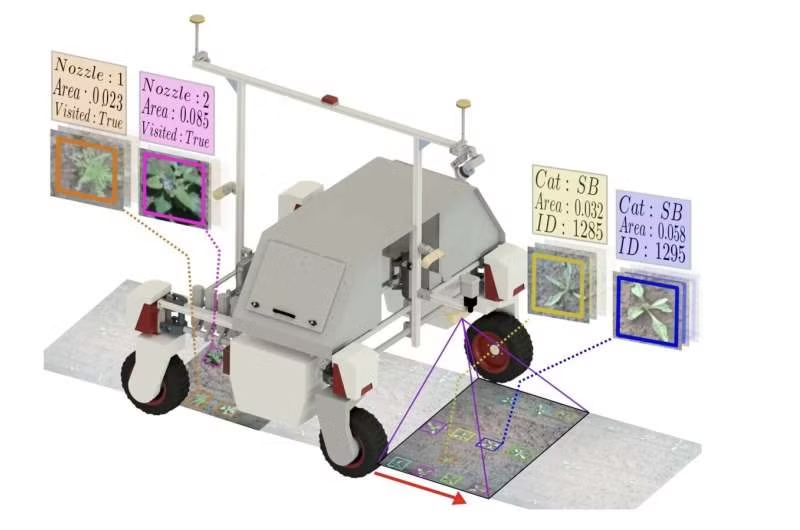
Robot do nhóm nhà khoa học Đại học Bonn chế tạo sử dụng một số cảm biến định vị vệ tinh GPS và đo đường đi (Odometry), xác định chính xác vị trí kể từ khi xuất phát. Robot có thể di chuyển qua cánh đồng, xác định vị trí, phân loại, đếm cây trồng, đồng thời kiểm soát cỏ dại bằng những công cụ, được tích hợp trong cấu trúc bên trong máy.
Đặc điểm quan trọng là hệ thống robot này hoàn toàn tương thích với Hệ điều hành robot phổ dụng (ROS), khung làm việc (framwork) và bộ công cụ lập trình điều khiển phần cứng robot trên máy tính. Trong khuôn khổ công trình nghiên cứu, TS Ahmadi và các đồng nghiệp đã biên soạn một bộ dữ liệu mới cho những thuật toán đào tạo robot để xác định vị trí và đếm ngô, loại cây trồng khó phát hiện bằng thị giác máy tính.
Nhóm nghiên cứu viết: “Trên cơ sở những phương pháp giám sát cây trồng, cho phép xác định vị trí và phân loại chính xác thực vật (cỏ dại và cây trồng), chúng tôi tiếp tục tiếp tục tăng cường hiệu suất của robot bằng giải pháp kết hợp nền tảng định vị vệ tinh toàn cầu GNSS với Phép đo vòng quay bánh xe, ước tính chuyển động và vị trí của robot. Sự kết hợp này tăng cường độ chính xác quá trình theo dõi của phương pháp giám sát cây trồng từ sai số trung bình được chuẩn hóa là 8,3% xuống còn 3,5%, theo đánh giá trên bộ dữ liệu công khai giám sát cánh đồng ngô. Chúng tôi cũng giới thiệu phương pháp sắp xếp các công cụ làm cỏ, gắn trên bộ truyền động tuyến tính, được thử nghiệm và đánh giá trong môi trường mô phỏng".
Trong quá trình nghiên cứu thiết kế, các nhà khoa học đã thử nghiệm và đánh giá robot BonnBot-I trên các cánh đồng mô phỏng, có sự phân bố điển hình của những loại cây trồng trên các cánh đồng thực tế. Những phát hiện ban đầu của nhóm hứa hẹn cho thấy tiềm năng của robot BonnBot-I, có thể trở thành một công nghệ hỗ trợ hiệu quả, chi phí thấp cho nông dân.
Trong tương lai, nhóm nhà khoa học sẽ tiến hành thử nghiệm trong môi trường thế giới thực, sử dụng nguyên mẫu thực tế đầu tiên BonnBot-I để xác nhận thêm tiềm năng của thiết bị.
Theo Tech Xplore