Các nhà nghiên cứu tại Viện Công nghệ Gandhinagar Ấn Độ vừa phát triển một phương pháp điều khiển mới, giúp đơn giản hóa cách robot mềm di chuyển, đồng thời tăng độ chính xác và giảm đáng kể khối lượng tính toán - đặc biệt hữu ích trong phẫu thuật và các môi trường chật hẹp.
Phương pháp này áp dụng cho robot liên tục dẫn động bằng gân - loại robot mềm, có thể uốn cong và xoắn linh hoạt như cơ thể sinh học. Nhờ đặc tính này, chúng rất phù hợp để hoạt động trong không gian hẹp, chẳng hạn như bên trong cơ thể người. Tuy nhiên, chính sự linh hoạt đó lại khiến việc điều khiển trở nên cực kỳ phức tạp.
Không giống robot cứng với các khớp cố định, TDCR có gần như vô hạn cách chuyển động. Điều này khiến việc dự đoán và kiểm soát vị trí trở thành một bài toán khó, nhất là khi robot có nhiều đoạn tương tác với nhau.
Các phương pháp hiện tại thường cần tính toán nặng, nên khó đáp ứng yêu cầu vận hành theo thời gian thực. Phương pháp mới giải quyết vấn đề này bằng cách đơn giản hóa cách biểu diễn và điều khiển chuyển động của robot.
Điều khiển đơn giản hơn, độ chính xác cao hơn
Nhóm nghiên cứu đã đề xuất một khuôn khổ gọi là “không gian kích hoạt ảo”. Thay vì phải điều khiển từng sợi gân, hệ thống chỉ cần 2 tham số: hướng và độ lớn của chuyển động.
Ông Madhu Vadali giải thích: “Robot cứng bị giới hạn bởi số khớp, còn TDCR thì có thể uốn và xoắn theo vô số cách. Khi số đoạn tăng lên, số lượng gân cũng tăng và chúng lại ảnh hưởng lẫn nhau, khiến việc điều khiển trở nên rất rối”.
Ông nói thêm: “Những yếu tố này tạo ra một bài toán phức tạp và dai dẳng trong việc lựa chọn đúng sợi gân để đạt được vị trí hoặc hình dạng mong muốn của TDCR”.
Với VAS, mỗi đoạn của robot có thể được điều khiển độc lập, tránh việc một đoạn chuyển động làm ảnh hưởng đến đoạn khác - một hạn chế phổ biến ở các hệ thống truyền thống.
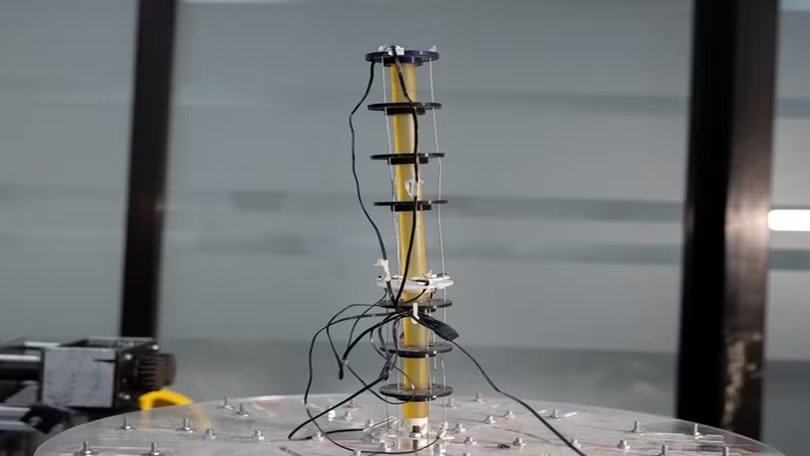
Để kiểm chứng, nhóm đã chế tạo một cánh tay robot gồm 2 đoạn, sử dụng 6 động cơ để điều khiển các sợi gân. Hệ thống camera kết hợp các điểm LED nhỏ giúp theo dõi chuyển động với độ chính xác cao, từ đó so sánh giữa vị trí thực tế và vị trí mong muốn.
Chuyển động chính xác hơn rõ rệt
Robot được yêu cầu chạm tới nhiều điểm và di chuyển theo các quỹ đạo phức tạp như hình ngũ giác, đường xoắn ốc và các đường cong. Kết quả cho thấy sai số dưới 1% - một mức rất ấn tượng.
Ông Md Modassir Firdaus cho biết: “Để đánh giá hiệu quả của phương pháp này, chúng tôi đã phát triển một cánh tay robot hai đoạn, sử dụng sáu động cơ để điều khiển độ dài các sợi gân nhằm đảm bảo khả năng uốn cong chính xác của TDCR”.
Ông Shail Jadav nói thêm: “Các điểm đánh dấu LED nhỏ cho phép camera theo dõi vị trí của robot. Sau đó, máy tính sẽ so sánh vị trí thực tế với vị trí mong muốn và điều chỉnh động cơ tương ứng”.
Kết quả cũng cho thấy các đoạn khác nhau của robot có thể hoạt động độc lập: một phần có thể uốn cong trong khi phần khác vẫn giữ nguyên, giúp cải thiện khả năng kiểm soát trong các nhiệm vụ đòi hỏi độ chính xác cao.
Nhóm nghiên cứu cho biết phương pháp này có thể được áp dụng cho các hệ thống phức tạp hơn với nhiều đoạn hơn, mở ra tiềm năng ứng dụng trong phẫu thuật, tự động hóa công nghiệp và kiểm tra trong các không gian hạn chế như động cơ máy ba.


Theo IE