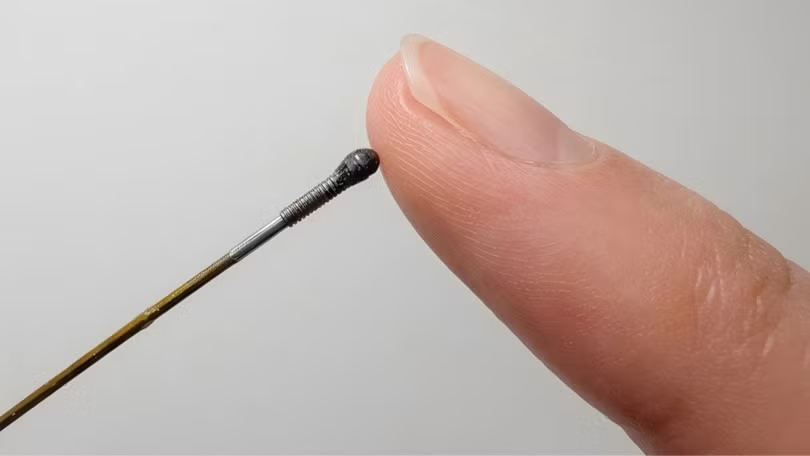
Các nhà nghiên cứu tại Trung Quốc đã phát triển một cảm biến quang học nhỏ bằng hạt gạo có thể mang lại cho robot phẫu thuật và các dụng cụ y tế khả năng “cảm nhận xúc giác”. Thiết bị này có thể đo lực, áp suất và chuyển động xoắn theo mọi hướng bằng ánh sáng thay vì linh kiện điện tử.
Cảm biến chỉ có kích thước 1,7 mm. Các nhà nghiên cứu cho biết nó có thể giúp robot phát hiện các tiếp xúc nguy hiểm trong những quy trình phẫu thuật tinh vi và phản ứng tức thời. Nhóm nghiên cứu cũng chứng minh rằng thiết bị này có thể xác định các cấu trúc ẩn dưới vật liệu mềm, bao gồm những vật thể giống khối u được nhúng trong mô mô phỏng.
Nghiên cứu được thực hiện bởi các nhà khoa học tại Đại học Giao thông Thượng Hải.
Ánh sáng thay thế linh kiện điện tử
Các hệ thống phẫu thuật robot hiện nay phụ thuộc rất nhiều vào hình ảnh. Tuy nhiên, chúng gặp khó khăn trong việc cảm nhận tương tác vật lý trong các không gian phẫu thuật chật hẹp. Những cảm biến lực hiện tại cũng còn quá lớn để tích hợp vào nhiều công cụ siêu nhỏ.
“Mặc dù các hệ thống hình ảnh hiện đại có thể hiển thị cấu trúc rất rõ ràng, nhưng chúng không cung cấp thông tin về tương tác vật lý như lực hoặc mô-men xoắn, còn các cảm biến lực hiện nay thường quá cồng kềnh hoặc phức tạp để tích hợp vào các dụng cụ siêu nhỏ,” trưởng nhóm nghiên cứu Jianlong Yang cho biết.
“Bằng cách cho phép máy móc đo lực tiếp xúc, áp suất, lực cắt và chuyển động xoắn, công nghệ của chúng tôi có thể giúp robot phát hiện sớm những tiếp xúc không an toàn và điều chỉnh hành động theo thời gian thực, đặc biệt trong các môi trường nhỏ và nhạy cảm,” ông nói thêm.
Các nhà nghiên cứu thiết kế cảm biến xoay quanh một sợi cáp quang có đầu đàn hồi mềm. Khi đầu cảm biến chạm vào vật thể, nó sẽ biến dạng nhẹ. Chuyển động cực nhỏ này làm thay đổi cách ánh sáng lan truyền bên trong cảm biến.
Một bó sợi quang đồng bộ sau đó truyền mô hình ánh sáng tới camera. Hệ thống phân tích hình ảnh thu được bằng các phương pháp xử lý dữ liệu để tính toán lực và mô-men xoắn theo mọi hướng.
Các nhà nghiên cứu cho biết thiết kế này tránh được sự phức tạp về dây dẫn thường thấy trong các cảm biến siêu nhỏ truyền thống.
“Cảm biến của chúng tôi hoạt động khác với các cảm biến lực siêu nhỏ truyền thống, chẳng hạn các hệ thống sợi quang Bragg (FBG), vốn phụ thuộc vào nhiều phần tử cảm biến và cấu trúc được thiết kế rất cẩn thận để tách riêng các thành phần lực khác nhau,” ông Yang nói.
“Chúng tôi không đo lực từng phần riêng lẻ mà cảm nhận toàn bộ trạng thái tiếp xúc chỉ trong một bước. Chúng tôi tin rằng sự thay đổi này có thể giúp việc chế tạo các công cụ nhỏ gọn vừa nhìn thấy vừa cảm nhận được trở nên dễ dàng hơn,” ông nói thêm.
Phát hiện cấu trúc ẩn
Nhóm nghiên cứu đã thử nghiệm thiết bị trong điều kiện tải trọng được kiểm soát bằng các lực và chuyển động xoắn xác định trước. Cảm biến cho kết quả đo lặp lại ổn định với độ trễ thấp, nghĩa là số liệu vẫn nhất quán trong các chu kỳ tăng và giảm tải.
Các nhà nghiên cứu cũng thử nghiệm thiết bị trên mô hình gelatin chứa các vật thể hình cầu cứng được thiết kế để mô phỏng khối u ẩn dưới mô. Cảm biến đã phát hiện và xác định thành công vị trí của các cấu trúc được nhúng này.
Nhóm nghiên cứu tin rằng công nghệ này có thể cải thiện khả năng định hướng xúc giác trong các ca phẫu thuật xâm lấn tối thiểu. Các bác sĩ phẫu thuật sử dụng hệ thống robot thường phải thao tác trong những lối đi cực hẹp, nơi các va chạm vô tình có thể làm tổn thương mô nhạy cảm.
“Các hệ thống robot dùng trong phẫu thuật xâm lấn tối thiểu hoạt động trong những không gian cực kỳ chật hẹp, chẳng hạn bên trong mắt hoặc qua các đường phẫu thuật nhỏ,” ông Yang cho biết. “Bằng cách giúp các công cụ và robot an toàn, chính xác hơn, công nghệ này có thể khiến các quy trình y tế tinh vi được kiểm soát tốt hơn và giảm nguy cơ tổn thương ngoài ý muốn.”
Hướng tới ứng dụng thực tế
Các nhà nghiên cứu hiện dự định cải thiện tính đồng nhất trong sản xuất và giảm yêu cầu hiệu chuẩn trước khi thương mại hóa. Họ cũng hướng tới tích hợp cảm biến vào các hệ thống robot y tế và công nghiệp để thử nghiệm dài hạn trong điều kiện vận hành thực tế.
Nhóm nghiên cứu cho biết công việc tiếp theo sẽ tập trung vào việc đóng gói công nghệ thành các hệ thống nhỏ gọn để bác sĩ và kỹ sư có thể dễ dàng triển khai trong môi trường thực tế.
Nghiên cứu đã được công bố trên tạp chí Optica.



Theo IE