Công nghệ thế giới ảo siêu thực được chứng minh là môi trường thực nghiệm hiệu quả để thử nghiệm điều khiển xe an toàn trong những tình huống nguy hiểm, do đó được coi là trường dạy lái xe tốt nhất cho xe tự hành (AV).
Tesla, Waymo và các công ty phát triển xe tự hành phụ thuộc rất nhiều vào dữ liệu để kích hoạt các trình mô phỏng thực tế đắt tiền và độc quyền, do thử nghiệm và thu thập dữ liệu tình huống nguy kịch hoặc khẩn cấp thường không dễ dàng thu thập hoặc mong muốn là tái tạo lại được.
 |
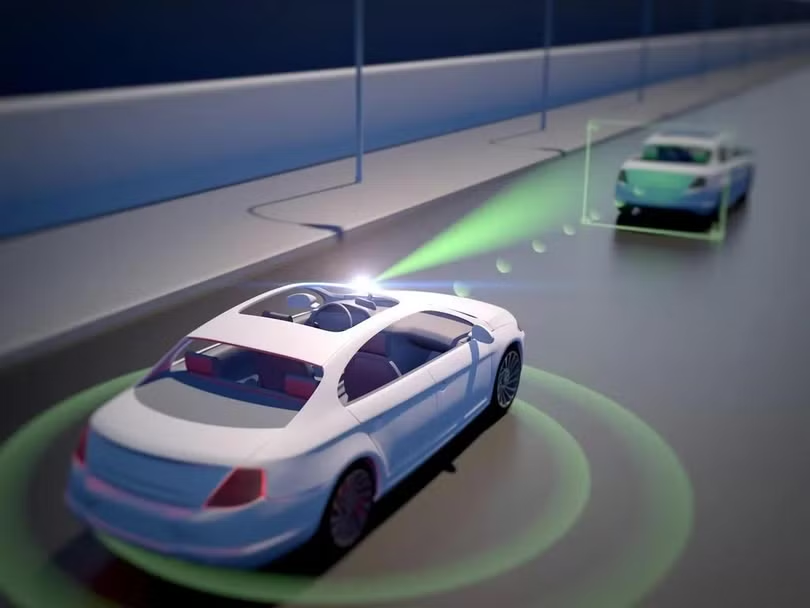
| VISTA 2.0 là một công cụ mô phỏng mã nguồn mở, có thể tạo ra môi trường thực tế để đào tạo và thử nghiệm xe ô tô tự lái. Ảnh do MIT CSAIL |
Từ suy nghĩ này, các nhà khoa học thuộc Phòng thí nghiệm Khoa học Máy tính và Trí tuệ Nhân tạo (CSAIL) của MIT phát triển “VISTA 2.0”, công cụ mô phỏng theo hướng dữ liệu, nơi các phương tiện tự hành có thể học cách lái xe trong thế giới thực và phục hồi trạng thái sau những tình huống suýt va chạm. Đặc biệt, tất cả phần mềm được phát hành dưới dạng mã nguồn mở cho công chúng.
Daniela Rus, GS MIT kiêm Giám đốc CSAIL cho biết: “Hiện nay, chỉ có các công ty quy mô lớn mới có phần mềm mô phỏng môi trường và khả năng tương đương VISTA 2.0 và là phần mềm độc quyền. Với bản mã nguồn mở mới phát hành này, cộng đồng nghiên cứu có được quyền truy cập vào một công cụ mới mạnh mẽ, hỗ trợ quá trình thiết kế và phát triển khả năng thích ứng với độ tin cậy cao hệ thống điều khiển các xe tự hành”.
| VISTA 2.0, trình mô phỏng mã nguồn mở cho ô tô tự lái. Video MIT. |
VISTA là một trình mô phỏng thực tế, dựa trên cơ sở dữ liệu để điều khiển xe tự hành. Phần mềm mô phỏng không chỉ video trực tiếp mà còn cả dữ liệu LiDAR và camera sự kiện, đồng thời kết hợp các phương tiện mô phỏng khác để mô phỏng các tình huống lái xe phức tạp. VISTA là mã nguồn mở cho tất cả những nhà sản xuất muốn phát triển hệ thống điều khiển xe không người lái.
VISTA 2.0, được xây dựng dựa trên mô hình mô phỏng trước đó của nhóm nghiên cứu. VISTA, về cơ bản khác với các trình mô phỏng AV hiện có vì xây dựng và hiển thị chân thực từ dữ liệu trong thế giới thực, cho phép chuyển trực tiếp từ mô phỏng đến thực tế khai thác sử dụng.
VISTA 2.0 là một hệ thống điều khiển dữ liệu có thể mô phỏng các loại cảm biến phức tạp và các kịch bản tương tác, các giao lộ trên quy mô lớn. Sử dụng ít dữ liệu hơn so với các mô hình trước đó, nhóm nghiên cứu có thể đào tạo các phương tiện tự hành về cơ bản mạnh hơn những phương tiện được đào tạo trên cơ sở số lượng lớn dữ liệu trong thế giới thực.
Alexander Amini, nghiên cứu sinh TS CSAIL cùng với nghiên cứu sinh TS Tsun-Hsuan Wang cho biết: “Đây là một bước tiến lớn về khả năng mô phỏng theo hướng dữ liệu cho xe tự hành, cũng như sự gia tăng quy mô thông tin và khả năng xử lý độ phức tạp khi điều khiển xe tự hành. VISTA 2.0 thể hiện khả năng mô phỏng dữ liệu cảm biến vượt xa máy ảnh 2D RGB, các màn hình LiDAR 3D độ phân giải cao với hàng triệu điểm ảnh, camera dựa trên sự kiện bất thường và thậm chí cả các kịch bản tương tác động với các phương tiện khác.”
Nhóm nhà khoa học đã mở rộng quy mô mức độ phức tạp của các nhiệm vụ lái xe tương tác như vượt xe đi trước, bám theo sau, thương lượng xin vượt, bao gồm cả các tình huống sử dụng đa phương pháp trong môi trường thực tế cao.
Hầu hết dữ liệu là hoạt động điều khiển xe thường xuyên, việc đào tạo các mô hình AI cho xe tự hành liên quan đến nhiều loại trường hợp nguy hiểm khác nhau và những tình huống bất thường, khó dự đoán.
Trong mô phỏng, phương tiện tự hành có thể di chuyển trong môi trường thực tế động, có các hệ thống điều khiển giao thông khác nhau, mô phỏng các loại sự kiện khác nhau, tạo các kịch bản tương tác phức tạp và người dùng có thể đưa vào các phương tiện giao thông hoàn toàn mới, không có trong dữ liệu ban đầu.
Nhóm nghiên cứu đã thử nghiệm khả năng hệ thống điều khiển xe tự lái đi theo làn đường, rẽ làn, đi theo ô tô phía trước, di chuyển trên các tuyến đường thực sự và những tình huống khó khăn hơn như vượt tĩnh và động (nhìn thấy chướng ngại vật và di chuyển xung quanh để không va chạm). Nhà khai thác sử dụng có thể đưa thêm các yếu tố khác nhau vào các kịch bản và kiểm soát hoạt động của các yếu tố này.
Hiện này, ngoại trừ những kịch bản tình huống dựa trên cơ sở dữ liệu thời gian thực, VISTA 2.0 vẫn chưa thể mô phỏng cảm xúc của con người trên làn đường giao thông. Đó là các hành động thân thiện hoặc không thân thiện, những hành vi khác nhau hoặc các động thái còi hoặc nháy đèn thể hiện cảm xúc, đó là những loại sắc thái mà nhóm muốn thực hiện trong phát triển tương lai.
TS Amini giải thích: “Thuật toán trung tâm của nghiên cứu này là phương pháp lấy một tập dữ liệu và xây dựng một thế giới tổng hợp hoàn toàn để học tập và đào tạo tự động hóa. Đây là nền tảng công nghệ có thể mở rộng theo nhiều hướng khác nhau trên lĩnh vực robot và tự động hóa. Phát hành VISTA 2.0 hỗ trợ cộng đồng thu thập bộ dữ liệu độc lập, chuyển đổi thành thế giới ảo, nơi nhà sản xuất có thể đào tạo huấn luyện hệ thống điều khiển các phương tiện tự hành trong thế giới này và sau đó có thể trực tiếp chuyển hệ thống sang những xe ô tô tự lái thực sự.”
Theo SciTechDaily